
How a hands-on “Drive-a-Spot” experience significantly increased participants’ comfort with and perceived suitability for robots.
Resources
By Topic:
By Type:
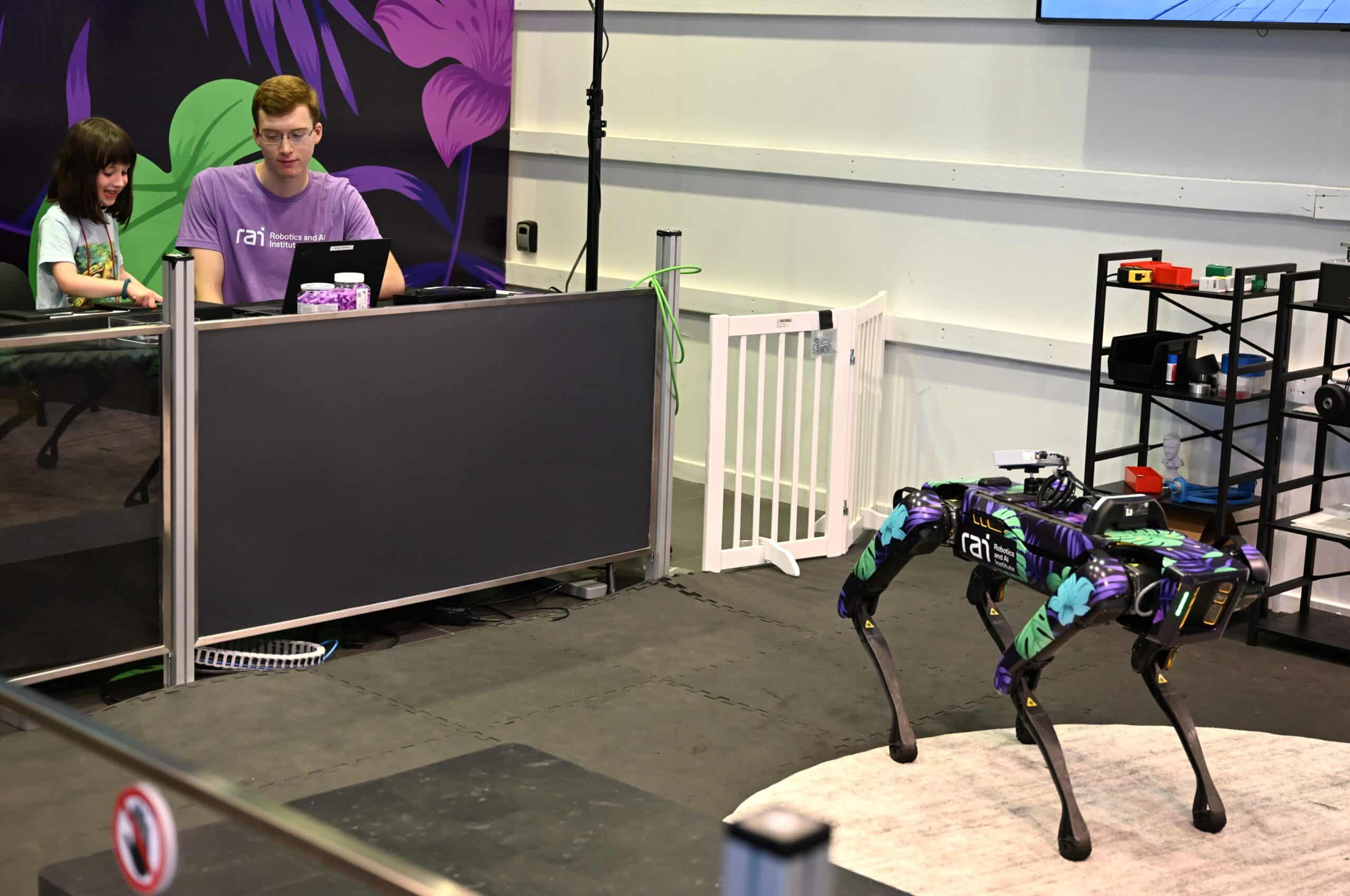
Pop-Up Encounters with Spot: Shaping Public Perceptions of Robots Through Hands-On Experience
In this study, we investigate how interacting with Boston Dynamics’ Spot, an agile, state-of-the-art quadruped robot, in a public pop-up booth affects perceptions of comfort...
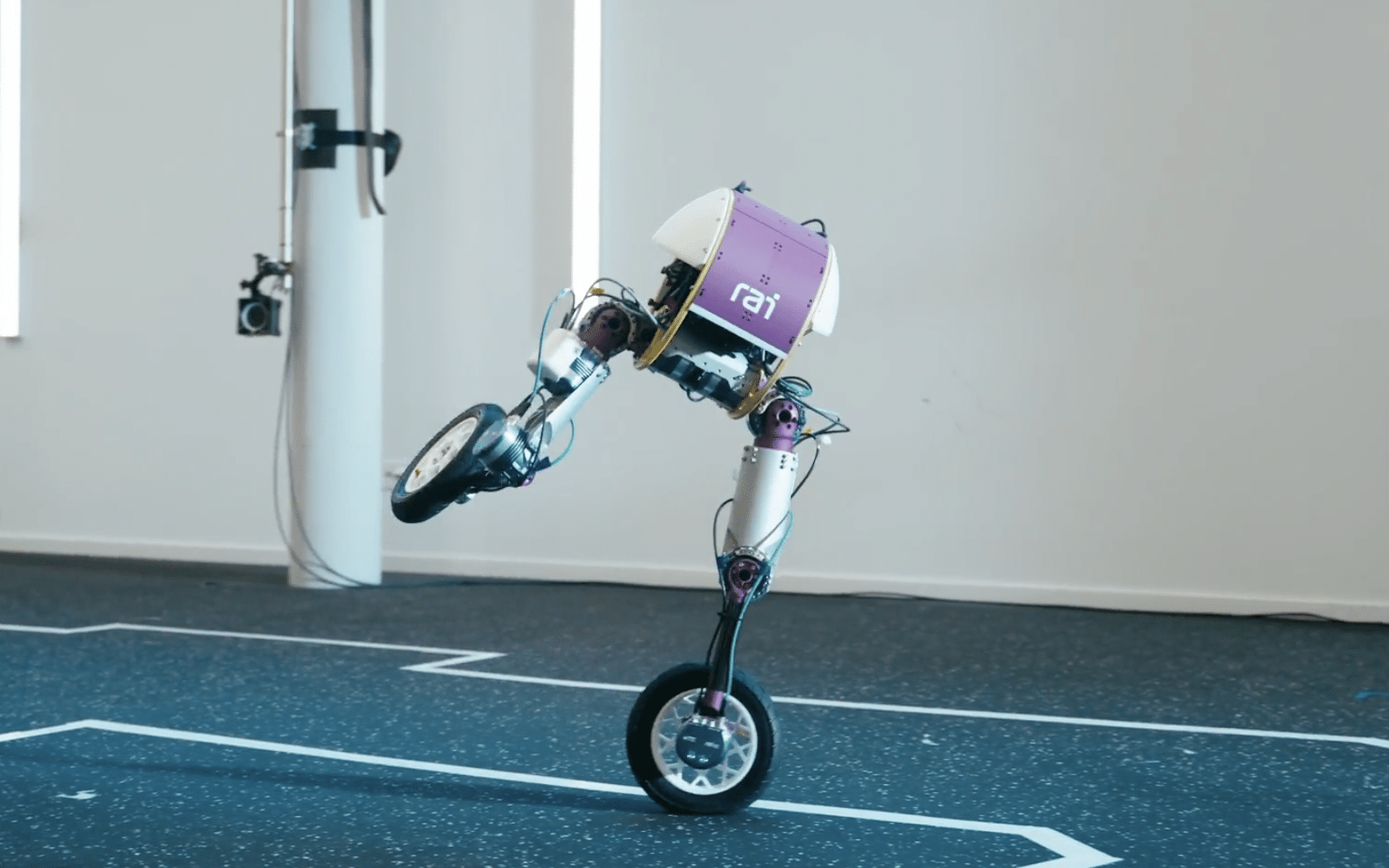
Meet “Roadrunner”: a bipedal, wheeled robot for multi-modal locomotion
Roadrunner can stand up from the ground, drive with its wheels side-by-side, or shift them in-line.

Flip Stunts on Bicycle Robots using Iterative Motion Imitation
This work demonstrates a front-flip on bicycle robots via reinforcement learning, particularly by imitating reference motions that are infeasible and imperfect. To address this, we...
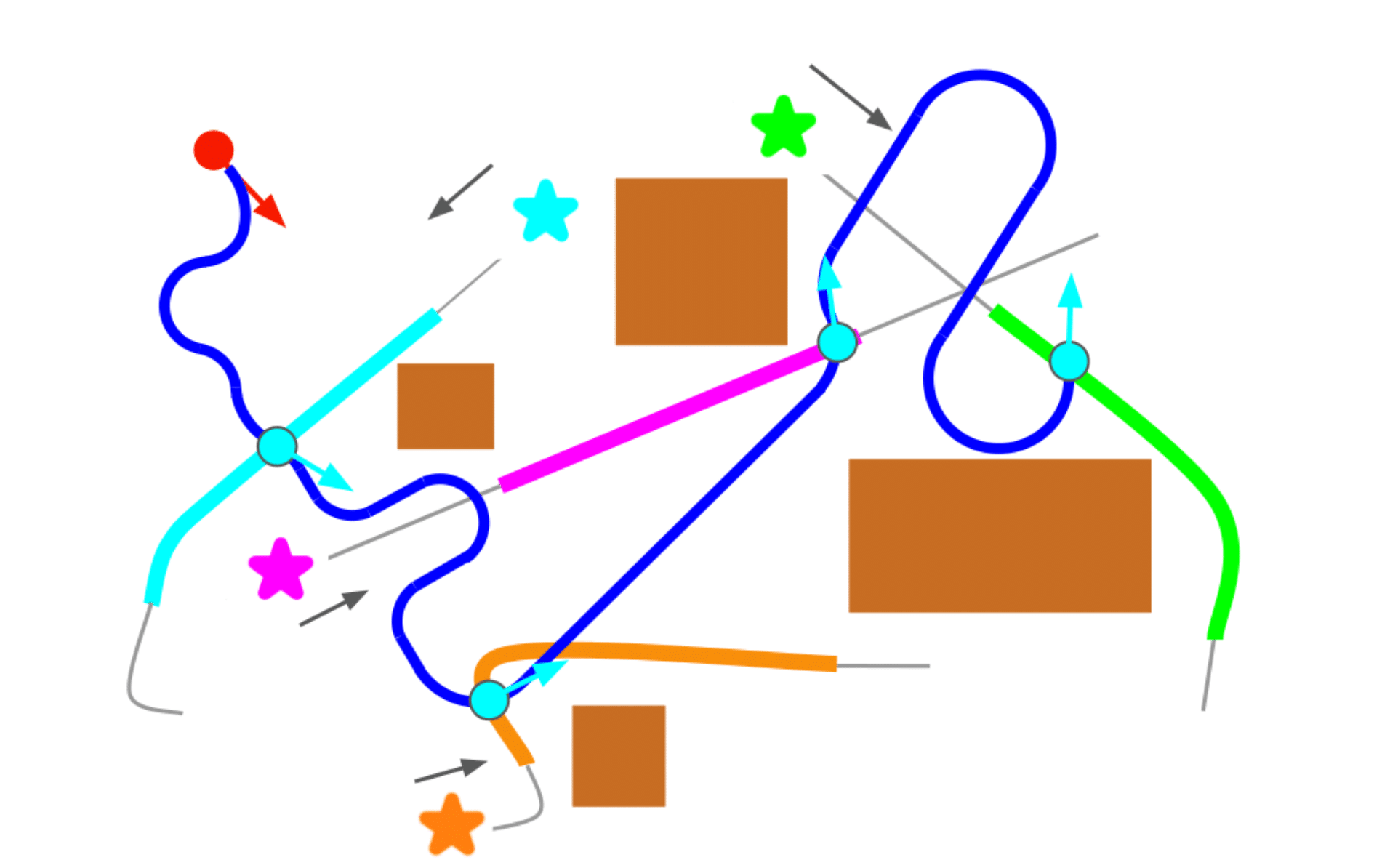
Lazy Anytime Planning for the Dubins Moving Target Traveling Salesman Problem with Obstacles
The Dubins Moving Target Traveling Salesman Problem with Obstacles (Dubins MT-TSP-O) seeks an obstacle-free trajectory for an agent with a fixed speed and minimum turning...
From Reflection to Repair: A Scoping Review of Dataset Documentation Tools
We examine the motivations behind building documentation tools, how authors conceptualize documentation practices, and how these tools connect to existing systems, regulations, and cultural norms.

Dull, Dirty, Dangerous: Understanding the Past, Present, and Future of a Key Motivation for Robotics
In robotics, the concept of “dull, dirty, and dangerous” (DDD) work has been used to motivate where robots might be useful. In this paper, we...

RAI Institute 2025: A Year of Innovation for Robotics and AI
There’s a world where robots integrate seamlessly into our daily work, and eventually our cities and home lives. When the RAI Institute was founded in...
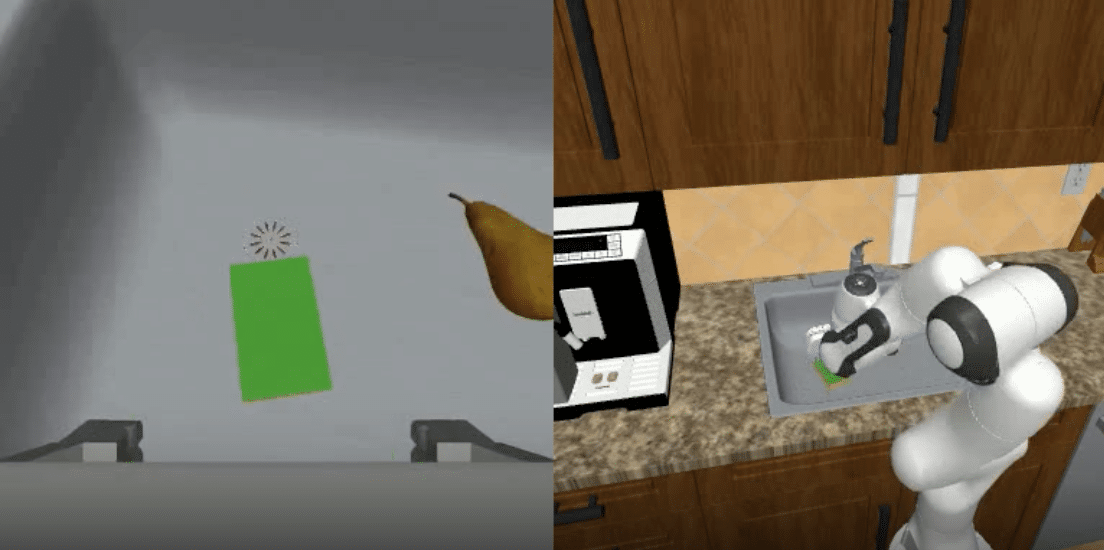
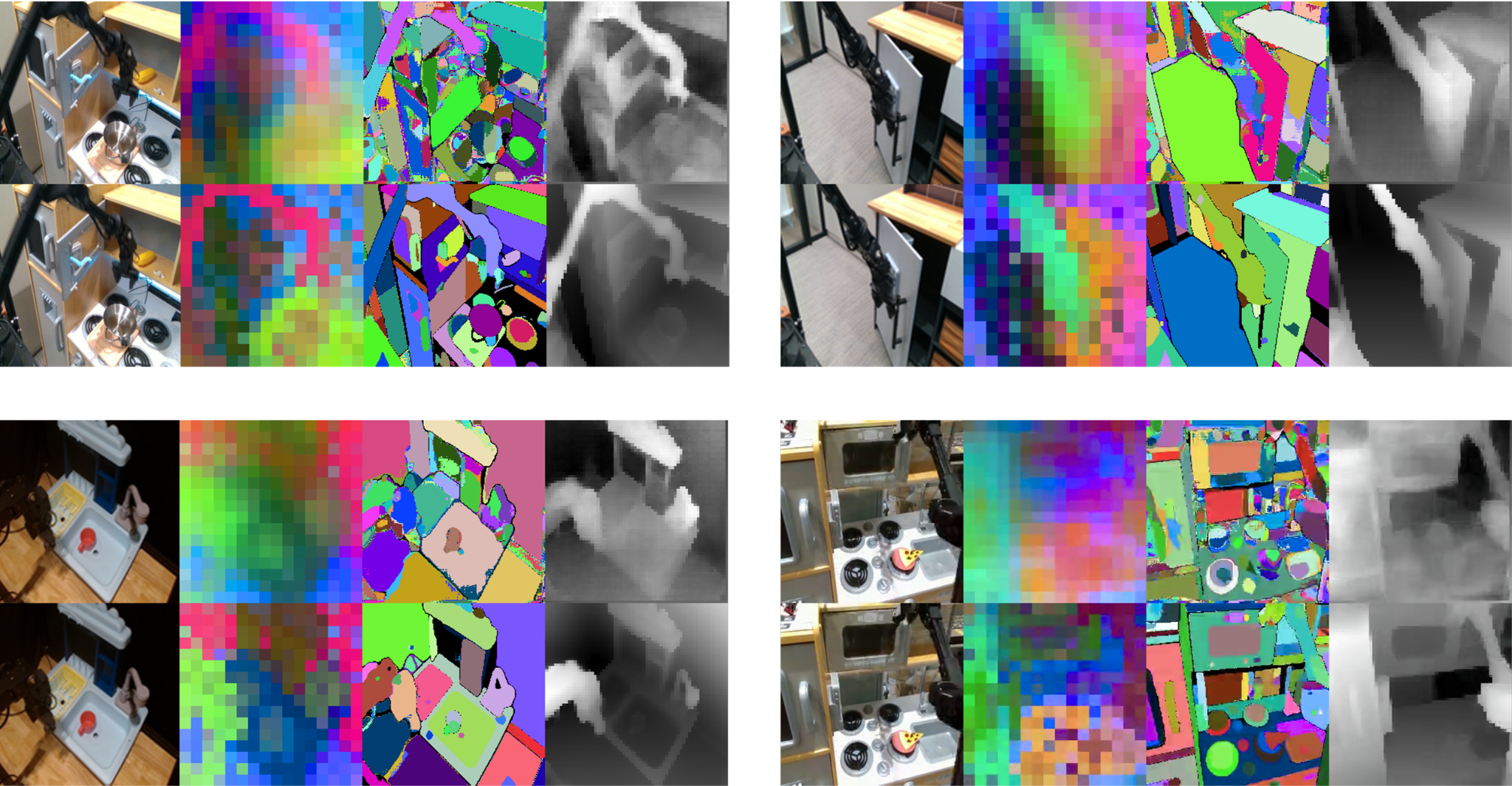
ROVER: Recursive Reasoning Over Videos with Vision-Language Models for Embodied Tasks
We propose ROVER (Reasoning Over VidEo Recursively), a framework that enables the model to recursively decompose long horizon video trajectories into segments corresponding to shorter...
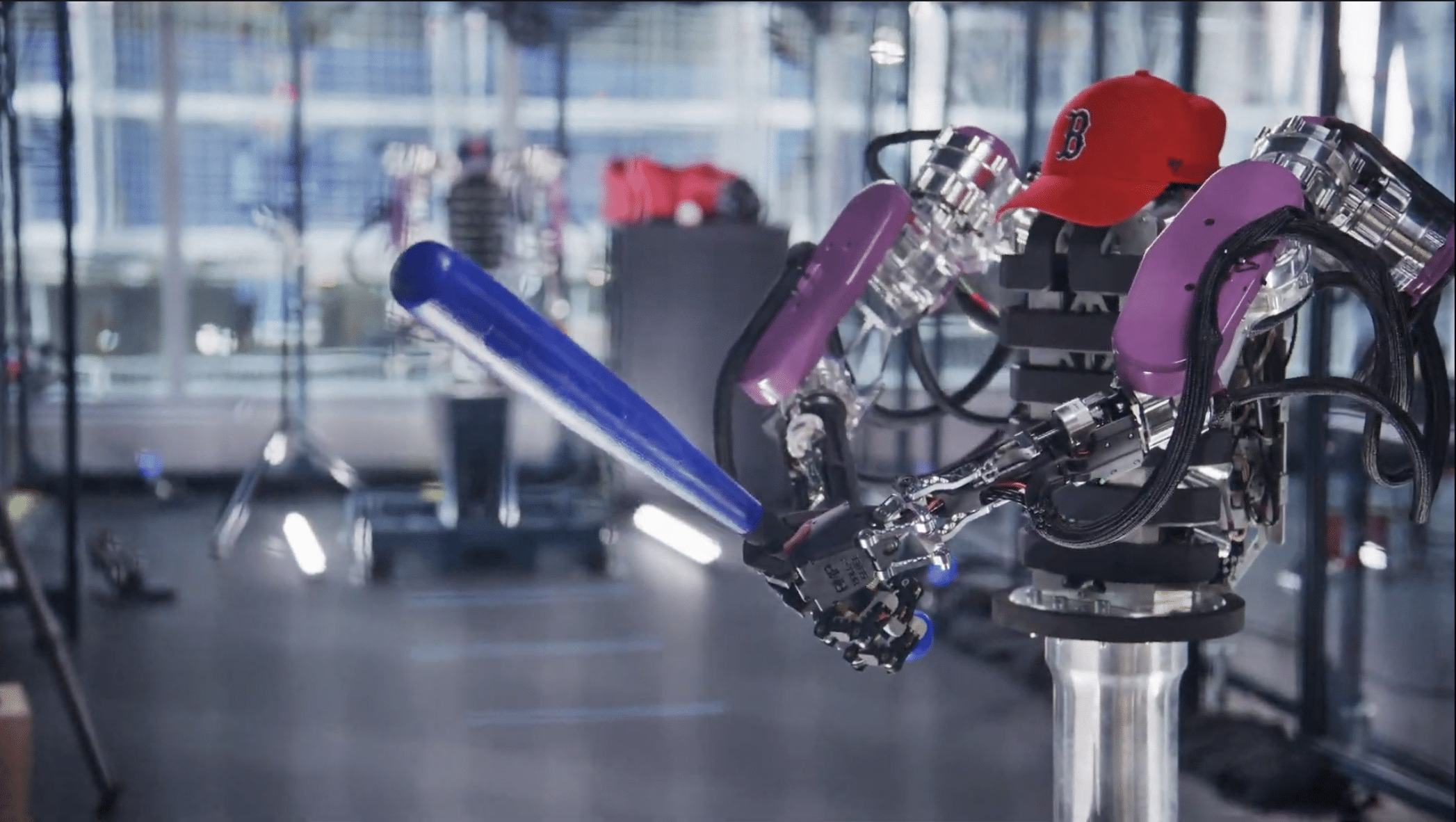
A Dynamic Robot That Can Throw, Catch, and Hit a Baseball
Researchers at the RAI Institute have built a low-impedance platform to study dynamic robot manipulation. In this demo, robots play a game of catch and...
From Walking to Working: Spot Stacks Tires
Spot robot performs dynamic whole-body manipulation using a combination of reinforcement learning and sampling-based control. Behavior shown in the video is fully autonomous, including the...
Combining Sampling and Learning for Dynamic Whole-Body Manipulation
Spot uses dynamic whole-body manipulation to autonomously upright, roll, drag, and stack 15kg car tires using an approach that combines reinforcement learning and sampling-based optimization